特斯拉年内开放AVP?马斯克再掀技术路线之争
编者按:本文来自微信公众号“车云”(ID:cheyunwang),作者:潘梓春,36氪经授权发布。
为了更新FSD,马斯克继“交通信号灯和停车标志自动检测功能”之后,又抛出了一个彩蛋:今年年内,特斯拉将实现“逆向智能召唤”。

也就是说,到时候特斯拉汽车不光能在停车场“接客”,还能在车主下车后自己找车位。
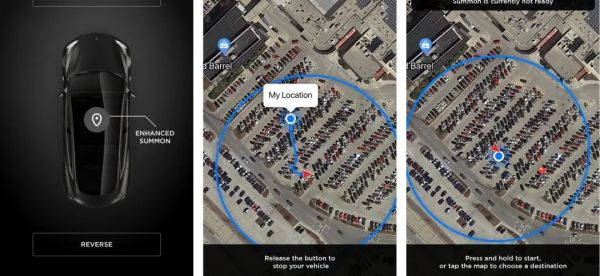
自Autopilot 10.0系统更新以来,“智能召唤”就被不少特吹拿出来炫技,但也有不少车主觉得鸡肋,“逆向智能召唤”反而显得更实用。简单来说,这项技术能够支持驾驶员通过在手机APP端发出指令,远程“遥控”车辆完成停车或驶出车位的动作。
整个过程不需要人类参与,是一个非常典型的限定范围内低速无人驾驶应用场景。如今,该功能也将作为年内FSD核心自动驾驶软件升级的重要组成部分推送到用户手中。
有意思的是,就是这样一个实现“泊车自由”的功能,特斯拉再次站在了传统车企的对立面。
还是那个特斯拉
自主泊车的原理大概是这样的——
自动驾驶车辆通过预先建好的停车场高精度地图,可以获取该停车场所有的车位信息。车辆在行驶过程中,融合环视感知以及超声波雷达感知的结果,对车位空闲状态作出识别,自动判断所经过的车位是否可泊入。
在真实停车场景中,往往会出现各种情况。由于不是结构化道路,车辆要面对复杂的人流、车流,如行人穿行、车辆占道、路口错车、突然出车等。这就要求一个系统必须拥有处理复杂场景的能力,能够实时捕捉周围车辆状态和障碍物动态。
整件事的难点在于,自动驾驶车辆需要判断出车位的宽度,依赖高精地图进行实时定位与车位识别。

“3D建模将改变智能汽车的游戏规则。”
对于自家功能的技术实现路径,马斯克信誓旦旦。按照他的说法,“逆向智能召唤”的逻辑是利用Autopilot标配的8个摄像头(3+2+2+1)获取车辆道路信息,通过3D建模绘制途径路程。
换句话说,特斯拉将突破第三方导航数据的限制,凭借市面上跑的数十万辆汽车,自己收集停车场数据。“特斯拉这种销量级别的车厂,依靠数据快速迭代是非常厉害的。”一位L4自动驾驶公司的技术负责人对车云菌说道。
当一台特斯拉汽车使用Smart Summon功能(智能召唤)在停车场中完成导航,其产生的所有驾驶数据都将提交并存储在特斯拉云端的服务器上,与GPS点位数据库结合。走过这条路的车越多,数据样本量越大,Smart Summon的路线算法就越精细,进而完善车主的使用体验。
相比昂贵的激光雷达建图,特斯拉依旧选择了视觉为主的方案来实现自动化绘图,并且不需要任何场端改造就能完成这件事儿。
年轻选手:车端就够了
“只有不依赖场端,才能让方案适应更多的停车场。”
这一次,小鹏依旧站队特斯拉。从这家新造车企最新曝光的前向泊车视频来看,团队同样选择了单车智能的路径。小鹏自动驾驶产品负责人黄鑫表示:“首先你得让车智能起来,才能去看路和环境是否智能。而不是依靠大量的基础设施改造,把车变成一个被遥控的角色。”
在这队人看来,场端改造技术上看起来相当美好,商业模式却是个悖论,量产可能性极低。“场端改造的成本谁来掏呢?车厂买单最终也是消费者买单。”
这种产品逻辑也无限接近于L4级自动驾驶玩家的方案。在Momenta的测试车上,车云菌直接看到了整个实时建图过程,车辆通过深度学习算法提取视觉语义特征,使用SLAM技术自动生成基于语义的高精度地图。
这种车端与云端结合的自动建图能力,被视作方案规模化量产的关键,核心在于通过这种方式能够进行低成本的复制。只不过,创业公司没有特斯拉市场铺量的优势,先期只能将大部分工作交给团队的专业建图车队。
传统玩家:不能忘了场端
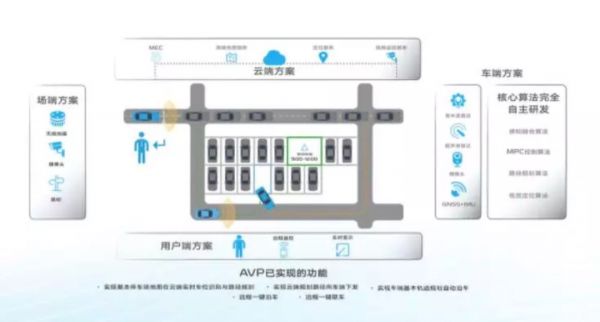
然而,在行业主流玩家眼中,整个停车系统不应该仅仅涉及到车端,还需要进行场端和云端的关联改造。
吉利汽车集团副总裁&CTO冯擎峰去年也拿出了一套自动泊车系统,其基于现有量产传感器配置,利用V2X技术,借助“云端”、“路端”、“停车场端”的辅助设施,以此100%实现自主泊车。吉利的思路是,由于利用了V2X技术,大量传感器可以通过在路端、停车场端部署,这样可以降低汽车上传感器的成本。
也就是说,这个名为“爬行者”的智能系统要融合汽车、网联、基础设施、政府和运营商的新生态的技术入口之一,基于L3级车端硬件的低成本技术路线助力,实现产品的快速落地。当时集团的规划是2021年量产,并实现全产品线配备,目前为止仍未有最新进展公布。
不只是吉利,“奔驰+博世”这个ACE组合的方案中,同样需要车端与场端进行硬件匹配。
车云菌之前也有机会实地体验了一把,发现在停车场内以及外部环境中,主要的硬件包括场地内的摄像头、本地服务器、互联服务器(比如手机)和进行信息交互的云端后台。对于车辆来说,需要配备的是制动系统(包含ESP)、电子驻车(EPB)、电动助力转向(包含EPS)、电子自动档杆、远程车辆启停这些功能,并未在自身传感器上进行改动或加装。
不过毕竟老牌大厂,突出一个不差钱。在整个地下车库的区域内,每隔几米就会有一个博世的激光雷达出现,而且进行了冗余设置,对范围内的区域重叠覆盖,即使有个别雷达失效也依然可以保证场地的正常使用。博世方面也承认,由于激光雷达的成本依然较高,后续大规模推广时还得将其换成普通雷达或摄像头等成本更低的硬件。目前具体方案尚未最终确定。

在车厂之外,科技巨头百度也表示支持这种车、云、图、场四端融合的方法。
按照百度Apollo的产品设计,车端负责中、近距离内环境感知、轨迹规划和车辆控制;云端用于接收车/场端环境感知信息,融合计算全局导航路线发送到车端,完成全局调度功能;图端则提供高精地图服务;场端最后完成涂装改造,提供中、远距离环境感知能力,以补强车端感知能力。
眼下Apollo Valet Parking首要进行的仍旧是车端改造工作。百度找到了威马,打算将Valet Parking软硬一体解决方案放在年底新推出的SUV上推向市场。
车云小结
两种路线孰优孰劣,我们暂且不做判断。AVP,自动代客泊车,也就是特斯拉口中的“逆向智能召唤”的落地优先级倒是可见一斑。
在功能上,AVP属于泊车辅助系统、ADAS(高级自动驾驶辅助系统)功能的升级;在技术上,则属于低速L4级自动驾驶。
从自动驾驶角度而言,封闭围栏内的低速行驶是业界公认的可以优先实现大规模商业化落地的场景,且暂时不会遇到法律法规的阻碍,AVP功能也就成了实现L4级自动驾驶的必经之路。
顺应技术整体商业化进程,自主泊车将是最先打通C端消费者与未来无人驾驶共享出行(Robo-taxi)行业的重要渠道。
道理放到特斯拉身上也一样。这些新功能的最终目标都是实现马斯克口中的全自动驾驶能力,以及组建一支自动驾驶出租车车队的计划。毕竟这位CEO早就公开承诺,要在今年为robotaxi准备好所有功能。
相关推荐
特斯拉年内开放AVP?马斯克再掀技术路线之争
特斯拉“无钴”之争
22.5 亿美元融资之下的自动驾驶路线之争
重磅:马斯克称将开放自动驾驶技术授权,还要卖动力电池
马斯克:三年内除了特斯拉开其他车都像骑马一样
特斯拉Autopilot再调价,粉丝一直在为马斯克情怀“填坑“?
焦点分析丨马斯克的野心岂止特斯拉,他还要“上天入地”
马斯克“做空”特斯拉
中国迷弟马斯克
马斯克“独孤求败”的自动驾驶路径,与特斯拉的“无人出租车”
网址: 特斯拉年内开放AVP?马斯克再掀技术路线之争 http://m.xishuta.com/zhidaoview8841.html