四目立体视觉优势场景已被验证,「清影视觉」拟进入业务复制阶段|项目报道
在三维机器视觉感知领域中,2D视觉技术由于存在底层逻辑上的桎梏,过于依赖数据驱动,准确性及可靠性有限,较难应对多样复杂的场景应用。市场已逐步形成共识,3D视觉技术的构筑逻辑更贴近三维结构逻辑,拥有更高的适用性。
市场上主流的三维立体机器视觉成像技术,主要有通过光脉冲传感时间来测量物体深度值的技术,比如TOF(Time of Flight);通过分析扫描光束的反射光谱来获得成像的技术,比如扫描3D和激光雷达;通过结构光与激光等辅助光手段的技术,比如结构光+单目、结构光+双目、激光+单目,这些技术手段主动使物体产生额外的光影、明暗、折射等信息,以辅助二维图像匹配算法计算三维数据;还有通过多个视点的同名点视差获取图像三维信息、以重构物体结构与深度信息的多目立体视觉技术,比如双目视觉、多目视觉。
不同技术在精度、可靠性、能耗、成像速度、被测物的复杂度和尺寸大小、场景复杂度等方面,均显示出各自不同的优势与局限,并适用于不同场景。比如单目+结构光/激光技术,因其成像输出稳定、精度高、集成便捷性佳,被市场采纳为主流的机械臂视觉方案。近年普及的双目+结构光技术,具备双目视觉的分辨率高、实时性佳等优点,同时通过结构光解决了双目视觉的算法歧义困难。因此,双目+结构光技术在工业检测、测量等场景中呈现出较好的精度与可靠性。
清影视觉设立于2016年,自主研发基于平行光轴四目立体视觉技术的三维矩阵相机及系列产品应用方案。目前清影视觉在三维矩阵整机生产设计、三维成像算法、三维点云显示/识别/运算平台等环节均拥有系列核心技术,形成了完整的软硬一体化方案,并已实现算法芯片化。
四目立体视觉矩阵相机采用不主动发光的纯被动式三维成像技术,拥有自己的优势场景。结构光/激光方案由于受功率限制、应用距离有限,其平面测量分辨率与图像传感器相比存在较大差距,其所产生的三维点云数据丢失了图像传感器所擅长的灰度值数据。同时,结构光/激光方案对于透明物体、红热物体、大曲率物体、皮毛等特定物体较难成像。此外,由于易受阳光干扰,结构光/激光方案更适合在户内场景使用。“我们的市场获客最开始都是由于其他技术方案做不了,客户才找到我们做。”清影视觉创始人曹亮向36氪介绍。
四目视觉技术较传统双目增加多一副“双目”,拥有较强的通用性,在室外阳光干扰、远距离、大视野等场景有着显著的优势,只要图像清晰,即可实现三维成像。清影视觉采用平行光轴四相机矩阵结构,使得不同视点采集的图像形成了垂直约束、平行约束、对角约束的几何关系约束。四目视觉技术利用多重几何约束的图像传感器像素所对应的固有几何结构关系,消除了双目算法常见的歧义,并使得算法快速、简便、低耗,而且多数场景下,不需要采用结构光进行辅助。
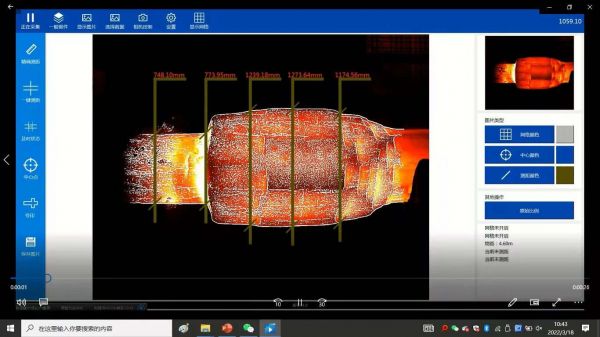
清影视觉供图:锻件测量
在工业矩阵相机整机研发方面,清影视觉根据应用场景的测量精度、测量视场范围、测量距离等要求,配置矩阵相机的具体参数,包括镜头、图像传感器、基线尺寸等,并结合已经定型的矩阵相机图像采集电路板和FPGA三维运算电路,形成具体的满足应用需求的相机布置技术方案。同时,研发团队配套开发三维矩阵相机软件,包括图像采集软件、图像预处理软件、三维成像软件、二维图像和三维点云数据显示软件、以及后期三维点云数据结合二维图像的特征尺寸提取和物体识别等涉及具体应用需求的开发平台软件等。在矩阵相机出厂前,清影视觉还需要对相机进行标定,并将标定结果形成配置文件,变成该相机的出生证明。
清影视觉的三维成像算法,采用几何结构流程化的即时三维卷积精确匹配方法。图像经过采集、增强、校畸等图像预处理后,相关数据通过嵌入式FGPA三维运算电路板进行运算,形成三维点云数据。随后,三维识别平台针对云数据开展进一步识别运算,比如说电线自动识别、锻件边缘自动识别、不同截面的尺寸提取、中心线的偏移或者弯曲度测量等等,整体过程的运算在几秒内完成。
由于四目视觉的算法便捷性和通用性,来自平面四相机矩阵结构的硬件思路和流程化三维匹配思路创新,因此清影视觉在硬件、三维运算算法、三维数据格式、应用系统等各环节均布局了阶梯式的国内外发明专利。曹亮认为,想要算法最优、最便捷,就需要这样的平面四相机矩阵结构,矩阵的硬件结构本身跟图像传感器同构,“如果绕开矩阵结构,斜向匹配算法就会更加复杂、耗能,即使开发出来,以后集成芯片时也可能存在劣势。”
“我们会继续往嵌入式芯片化方向改良,四个图像在四个FPGA内分布计算,然后直接在三维运算FPGA内完成三维成像,进一步提高运算速度,使三维成像运算集成化、小型化。”曹亮表示,“清影视觉方案的成本比雷达方案显著低,在同距离下,性能也更好,日后在无人驾驶场景也同样会有广泛的应用前景。相对于双目+结构光方案,在弱纹理场景中,清影视觉的技术方案也可以便捷加上结构光辅助使用。四目方案拥有更强的几何结构逻辑,整体成本也就较双目视觉多一副‘双目’,成本增加非常少。”
由于技术和算法具备通用性,清影视觉的四目视觉技术在各种户外巡检、测量,以及高温或柔性工业制造中有较好的应用前景,但客户的应用场景仍然在硬件上以及应用算法上存在许多的定制化需求。为平衡开发投入,清影视觉仍然在持续根据市场应用需求选择订单,优先选择可高复用的需求,以沉淀出后续可高复用的硬件母机和一体化方案。
曹亮承认清影视觉的市场开拓节奏略有滞后:“前两年曾与双目+结构光方案竞争场景,市场教育和开拓成本较高,另外在选择可推广复用的应用订单方面也做了一些探索,在产品化方面绕了一些路。”
随着加强优势场景的市场拓展,清影视觉目前在四目视觉优势场景,已逐渐积累了若干标杆性案例。比如无人机三维测量系统,与大疆无人机实现高度融合,完成了操控一体、数据共享、电源共享的产品化开发。无人机系统应用于南方电网的电网导地线覆冰厚度自动测量系统,可自动识别和测量电线覆冰的厚度尺寸,具备较好的耐候性,并拥有高于激光雷达的测量精度。与武汉重工、北京建工合作的大型红热锻件三维动态测量系统、装配式建筑构件三维测量系统,也体现了四目视觉在外形和尺寸变化剧烈的大型红热工件、以及大型建筑构件上的测量和识别优势。

清影视觉供图:无人机方案
“目前即将落地的重点项目是与林业设计研究院合作的便捷式三维立体相机,直接手持做林业样地的采集和测量。无人机测量、锻件动态测量、建筑构件测量、便捷式三维测量相机,将是接下来重点推广和开发的四种应用产品。”曹亮补充。
清影视觉2021年获得了江苏敏一智能制造基金1000多万元的Pre-A轮融资,年内预计追加A轮融资,资金用途主要为产品量产生产、研发投入与市场开拓。
责任编辑:王与桐
相关推荐
四目立体视觉优势场景已被验证,「清影视觉」拟进入业务复制阶段|项目报道
工业机器视觉解决方案供应商「了然视觉科技」,将航天领域视觉技术落地工业场景
自动驾驶的视觉密码,一场隐秘的战事
采用TOF立体视觉技术,「远景智能」瞄准安防、汽车、物流等工业细分市场
36氪独家 |「元橡科技」完成和利资本领投的近亿元A+轮融资,推出以专用芯片为基础的双目视觉解决方案
从黑白,到彩色,再到3D,视觉技术一直在追赶人类的眼睛
视觉语音双重验证定位会议发言人,「庄生晓梦」要以智能会议终端切入远程会议市场
瞄准医学视觉蓝海,「优医视觉」让医学知识“3D交互可视化”
36氪首发 | 「宝链智能」获千万级Pre-A轮融资,提供工业视觉3D高精度解决方案
AI前沿:工业视觉的技术与产品挑战
网址: 四目立体视觉优势场景已被验证,「清影视觉」拟进入业务复制阶段|项目报道 http://m.xishuta.com/zhidaoview24444.html