耶鲁开发“进击的黏土”,穿两层衣服就变身机器人:给自己捏形状,还能越障
编者按:本文来自微信公众号“大数据文摘”(ID:BigDataDigest),编译 赵伟、曹培信,36氪经授权发布。
“终结者6:黑暗命运”要上映了,所有主演全部回归,让一众终结者迷们期待不已。
除了施瓦辛格的那句经典台词,“I will be back”,看过第二部的小伙伴应该都记得这个经典的场景。
文摘菌含泪表示,童年也被液态金属机器人T1000的恐惧支配过。
而近几年,随着机器人产业的发展,各个研究机构对于软体机器人的研究愈发重视。正如Science Robotics主编杨广中所说:机器人要突破马达+齿轮的工业时代印象。
IEEE也从2018年开始举办国际软体机器人大会Robosoft,今年是在韩国首尔举行的第二届。提交到大会的论文中,研究者们使用了各种各样的材料来实现机器人的柔性可变,比如嵌入式离子凝胶、离子聚合物、金属复合材料等,甚至是使用气体作为填充物。
最近,根据IEEE报道,耶鲁大学的研究人员用黏土作为填充物,利用一个变形层和一个运动层组成的表面,开发了一款可以根据环境改变自己形状的软体机器人。该项目在IEEE机器人与自动化国际会议(ICRA)展出。
黏土穿上两层衣服,变身“进击的黏土”
让一块黏土成为一个可以变形的机器人需要几步?
耶鲁大学的研究人员告诉你只需要三步:
1、先把一块黏土搓成一个圆柱;

2、给黏土穿上第一层“衣服”;
3、给黏土穿上第二层“衣服”。
现在你就得到了一只会变形、会越障的“进击的黏土”!

为了实现运动和变形行为,研究人员制作了两个机器人表层皮肤——对应不同的任务,称之为变形层(Morphing Skin)和运动层(locomotion skin)。这两层可以彼此叠合,或者甚至通过缝合或胶粘成为一体。
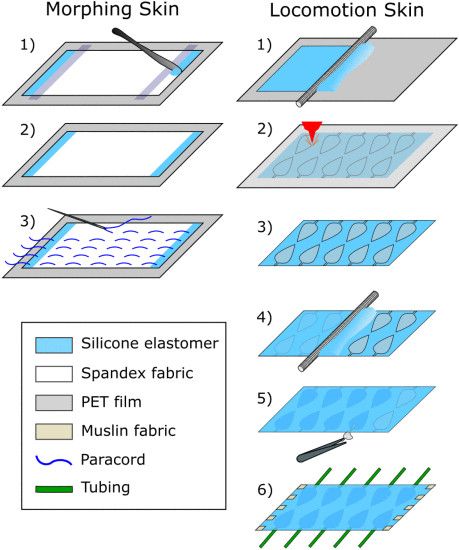
图1:变形层(Morphing Skin)和运动层(locomotion skin)
变形层(Morphing Skin):一张会捏橡皮泥的网
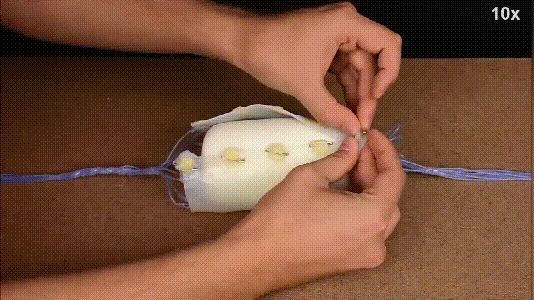
变形层直接包裹在黏土上,为了实现高可塑性,研究人员使用密集的特制绳索像织毛衣一样缝在一块氨纶基材上,然后通过缠绕马达的伸缩拉扯实现对黏土形状的改变。
具体来说,变形层是由多根平行缝在氨纶织物基材上的电缆组成(图1,左)。首先,织物较短的边缘,对应于电缆的终端,用硅橡胶加固(DragonSkin 10,Smooth-On)。然后将Paracord(一种直径1.18mm的绳索)缝入织物(1520厘米),缝合间距为0.75厘米,电缆与电缆间距为0.75厘米,总共20根电缆。1厘米长的布片沿着布片较短的边缘固定在加强片上,这样变形层就可以安全地包裹在黏土上。
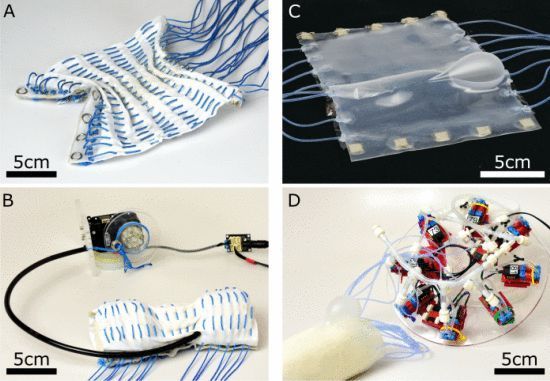
图2:(A)变形层。(B)伺服电机将多根电缆绕过Bowden电缆护套。(C)运动层。(D)8个气动调节器控制气囊的充气和放气。
实用的变形层设计对电缆的抗拉强度、可缝性和适当的电缆间距都有要求。尽管增加电缆密度有利于提高变形的分辨率,但随着电缆数量的增加,电缆与电缆之间的摩擦以及相关硬件的复杂性也会引起问题。但是间距过于稀疏又可能会导致局部挤压,无法将驱动转化为黏土体的整体变形。因此,变形层的设计是由与所选黏土的材料特性的相容性是有关的。
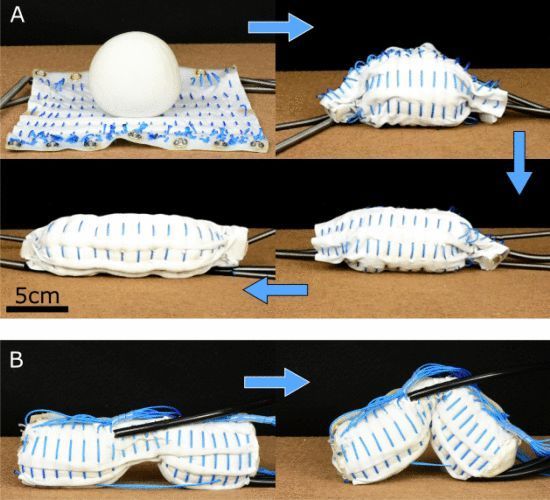
变形过程是通过电缆的拉扯改变黏土的径向收缩达到。每根电缆可以改变它所包围的圆形截面的半径,因此产生的形状跨越所有径向对称的形状,如圆柱体、哑铃和圆锥体。通过对电缆进行纵向定位,可以得到形状变化所需的弯曲运动或类似于蠕虫的运动。
运动层(locomotion skin):双排气囊组成的腿
机器人的运动策略有很多种,包括但不限于四足运动、滚动(通过控制重心的移动或材料的局部挤压来驱动)、和履带式运动。这款机器人主要利用滚动进行运动。
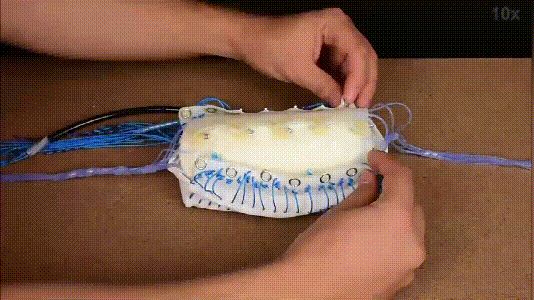
为了实现移动,运动层是在硅胶薄膜中制作了一系列面向外部、平行的气囊(图1,右)。硅酮弹性体作为棒涂层上PET薄膜,形成一个20×15× 0.2cm的平面。固化后,气囊被激光切割成PET薄膜,留下未切割的硅树脂层。
被切割后的气囊排列在运动层的表面,研究人员考虑了三种布局设计:一排,两排和多排气囊。对于单排设计,气囊的形状以及无缺陷的制造更为关键,因为任何不对称都会导致不均匀的膨胀,从而导致无意的转动。采用双排设计,不对称性不是问题,因为每个执行器仅在皮肤的末端操作。而多排气囊导气管的安装过于麻烦,所以研究人员最终选择了双排气囊。
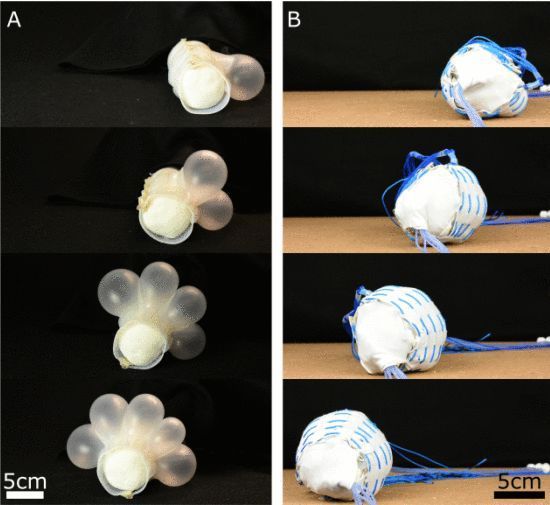
然后将运动层覆盖在变形层上,按照一定顺序向气囊充气使其膨胀,从而产生滚动运动(如下图所示)。
忽略摩擦,角加速度与扭矩(相当于来自气囊的切向力)和质量惯性矩成正比:α=T/J。因此,在低加速度下,可以用相对较小的力来完成一块黏土的滚动。研究人员发现很小的压力(≈3psi)足以快速有力地给气囊充气,从而实现运动。
未来应用广泛,可以搭载传感器协助搜救
通常,机器人专家需要去想机器人要完成的功能,再去着手设计这款机器人,因为这些功能决定了机器人的形状。但是为了完成更广泛的任务,或者能够在未知或高度变化的环境中工作,能够改变自身形状的机器人就可以提供很强的通用性。
这种变形功能和运动功能可以互补的机器人,未来的应用可以预期将会十分广泛。
比如在搜救工作中,就可以使用黏土作为介质作为如传感器或信号发射器这样的有效载荷。由于拥有变形的能力,就可以用一个大直径的圆柱体快速穿越平坦的地形,而当遇到障碍时,黏土机器人可以改变形状,通过障碍。
或者更广泛地说,应用方面还包括资源有限的情况。例如通过改变形状,可以从一个球状机器人变成一个机器手臂关节。利用这种变形系统,可以将黏土机器人变换成不同的形状以执行不同的功能。
论文链接:
https://ieeexplore.ieee.org/document/8653947
相关报道:
https://spectrum.ieee.org/automaton/robotics/robotics-hardware/robot-made-of-clay-can-sculpt-its-own-body
相关推荐
耶鲁开发“进击的黏土”,穿两层衣服就变身机器人:给自己捏形状,还能越障
自动叠衣服机器人胎死腹中,是价格的扭曲,还是功能的故障?
这届年轻人爱换“QQ秀”的中二病还能治好吗?
将SLAM算法应用于幕墙清洗,「映星智能」研发全自动高楼玻璃幕墙清洗机器人
MIT华人科学家打造线形机器人:灵活穿行脑血管,还能轻松急转弯
AI筛查自闭症起源突变基因,还能解锁你的艺术细胞?
炒菜炒出200亿身价,捏脚捏出1600家店
北京商场SKP封杀外卖员上热搜:穿外卖衣服就不行
进击的“波士顿动力”,对“贝尔实验室”说不
你穿的汉服很美,但十有八九是山寨
网址: 耶鲁开发“进击的黏土”,穿两层衣服就变身机器人:给自己捏形状,还能越障 http://m.xishuta.com/newsview8987.html