“机器鼠”出动:北理工团队X光片精度还原老鼠脊柱灵活度,可用于管道检测
城市之上是人类的钢筋之所,所有设施空间,都为两足的人类设计。
但城市之下,又是另一片不一样的世界。燃气、水电、热力、通信等管道网络交互系统星罗棋布,织出了城市的动力脉络,这里是另一类物种的驰骋所——四足爬行动物,蟑螂、老鼠们在这里如履平地。
正如在地面的各种行动有时候需要四足机器人一样,地下的活动则依赖小型四足机器人完成。在极端情况下——燃气爆炸、通信中断,以人力对狭小空间开展探测极为困难,在自然灾害来袭时,更是危机重重。
蛇和蟑螂外形的机器人早已出现,但老鼠也非常善于挤过狭窄的开口和穿越不平坦的地形。

那么,有没有可能用“机器鼠”协助人类进行地下空间的探索呢?
在4 月 7 日发表在IEEE Transactions on Robotics上的一项研究中,北京理工大学的团队“灵微智探”就发布了一款名叫SQuRo的智能类鼠机器人。
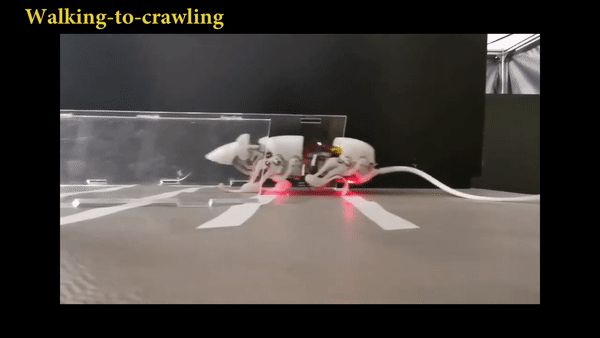
研究展示了SQuRo以前所未有的敏捷性行走、钻洞和爬过物体的能力

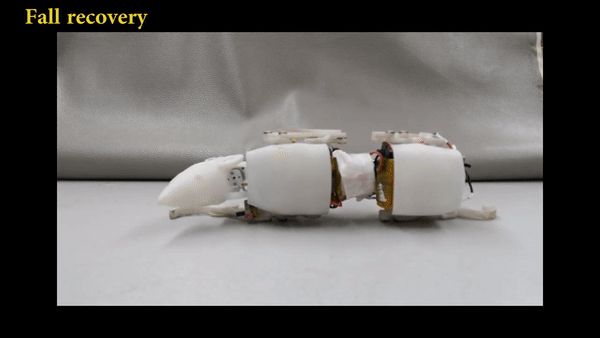
更重要的是,SQuRo 可以从跌倒中重新恢复站立
研究团队的指导老师,也是北理工教授石青解释说:“尽管腿式机器人在现实世界的应用中非常有前景,但它们在狭窄空间内操作仍然具有挑战性。” “大型四足机器人无法进入狭窄空间,而微型四足机器人可以进入狭窄空间,但由于承载重物的能力有限,因此难以执行任务。”
这也是为什么这个团队没有设计一个大型的四足机器人或微型机器人,而是决定创造SQuRo,灵感正是来自一种非常擅长挤过狭窄空间的动物——老鼠。
基于老鼠X光片还原脊柱灵活度,
首个完成立、走、转、爬、复起的小型四足机器人
虽然名字的发音类似英文的松鼠,但是据了解,SQuRo基于某种老鼠rattus norvegicus的身体大小和形态打造,机器人的四条腿各有两个自由度,腰部有两个,头部有两个。这种设置复制了实际老鼠的长而灵活的脊柱,并使机器人能迅速弯曲身体并转身。

SQuRo机器人的最小转弯半径只有0.48个身体长度,这比其他小型四足机器人还要小得多。SQuRo比同类型机器人更“苗条”、也更轻。
研发团队首先使用真实大鼠的X射线来更好地了解动物的解剖结构,尤其是其关节。然后,他们设计了 SQuRO,使其具有与这类啮齿动物相似的结构、运动模式和自由度 (DOF)。这包括肢体、腰部和头部的两个自由度;该设置允许机器人复制真实大鼠灵活的脊柱运动。
SQuRo 通过一系列实验进行了测试,研究团队发布的视频中,机器鼠首先探索了它执行四个关键动作的能力:从蹲下到站立、行走、转身和爬行。转弯结果尤其令人印象深刻,SQuRo 证明它可以在不到自身身长一半的非常狭窄的半径上转弯。“值得注意的是,转弯半径比其他机器人小得多,这保证了在狭窄空间内的敏捷运动,”施说。

接下来,研究人员在更具挑战性的场景中测试了 SQuRo。在他们设计的一种情况下,机器鼠必须穿过一条模仿洞穴环境的狭窄、不规则的通道。SQuRo 成功地通过了这条通道。在另一种情况下,SQuRo 成功地在包括高达 20 度的坡度的场地上装载了 200 克的重量(其自身重量的 91%),这也为它未来真正工作时携带相机、传感器等提供了可能。
任何在灾区、管道或其他具有挑战性的环境中航行的机器人都需要能够越过它遇到的任何障碍物。考虑到这一点,研究人员还设计了 SQuRo,以便它可以向后靠在它的臀部上,并把它的前肢放在一个可以爬过物体的位置,类似于真正的老鼠。在一项实验中,团队证明了 SQuRo 可以以 70% 的成功率通过 30 毫米高的障碍物(即其自身高度的 33%)。在最后的实验中,SQuRo 在侧倒后能够自行回正。

“据我们所知,SQuRo 是第一个能够执行五种运动模式的这种规模的小型四足机器人,包括蹲下到站立、行走、爬行、转身和跌倒恢复,”石青说。
北理工本科生搭建的科研团队,未来或将机器鼠商业化
早在2019年,北京理工大学机电学院的三位本科生和两位研究生组成了“灵微智探”团队,聚焦微小型仿生机器人技术领域。团队考察了狭窄空间的多工况、小空间和复杂环境情况,分析了现有微小型仿生腿足机器人在系统集成度、运动模式、感知能力方面的问题,采用仿生设计思路,选择能在狭窄空间里灵活机动的老鼠作为仿生对象,确定机器鼠的机械结构设计方案,独立完成电驱动系统的设计和选型,并在机器鼠上搭载感知传感器。

据相关报道,“灵微智探”这个名字也各有深意。
灵——灵巧,根据狭窄空间工况环境复杂的特点,提出了多运动模态控制方法,使得机器鼠能够在不同的狭窄环境下顺利完成移动、探测、侦察作业。
微——微小,采用X光照片分析手段,根据生物鼠的骨骼进行仿鼠结构和机构设计,实现了微小尺度下仿生腿足及柔性腰部结构的设计。
智——智能,构建了微型双目视觉及仿鼠微触须感知系统,利用深度学习算法融合实现了复杂环境多维智能感知。
探——探测,通过管道等狭窄空间巡检探查,实现了目标识别与环境的瑕疵检测。
据介绍,“灵微智探”团队已经申请多项技术专利,在机器人领域国际会议IEEE RCAR 2020上发表相关学术论文。团队成员还采用3D打印方案重新制造轻量化零部件,使得机器鼠在新控制算法作用下,迅速在实验狭窄空间内实现相关功能。
石青表示,该团队有兴趣将机器人商业化,并计划通过闭环控制和深入的动态分析来提高其敏捷性。“此外,我们将在机器人上安装更多传感器,以便在狭窄的非结构化管道中进行现场测试,我们相信,在配备摄像头和其他检测传感器后,SQuRo 有可能用于管道[故障]检测。”
相关报道:
https://spectrum.ieee.org/robotic-rat-climbs-crawls-turns
https://ieeexplore.ieee.org/document/9751239
https://www.sohu.com/a/539625900_320333
https://www.sohu.com/a/496089430_243614
本文来自微信公众号 “大数据文摘”(ID:BigDataDigest),作者:Mickey,36氪经授权发布。
相关推荐
“机器鼠”出动:北理工团队X光片精度还原老鼠脊柱灵活度,可用于管道检测
开发基于结构光的3D工业相机,「深浅优视」实现微米级在线检测
山火和洪水之后,老鼠正在攻陷澳洲
华人力学家黄永刚团队新作:大脑光遗传植入让小老鼠一秒变基友
猫主子总往家里带老鼠?那就用深度学习造一个“猫门”吧
高精度、低成本,「中科融合」要以MEMS结构光3D感知模组切入3D成像市场
百年「追光者」蔡司,何以引风来?
年轻人的第一条机器狗来了
毕加索把它们“藏”起,AI 又给“挖”了出来
机器视觉农业应用,帮助识别环境、监测作物
网址: “机器鼠”出动:北理工团队X光片精度还原老鼠脊柱灵活度,可用于管道检测 http://m.xishuta.com/newsview62404.html