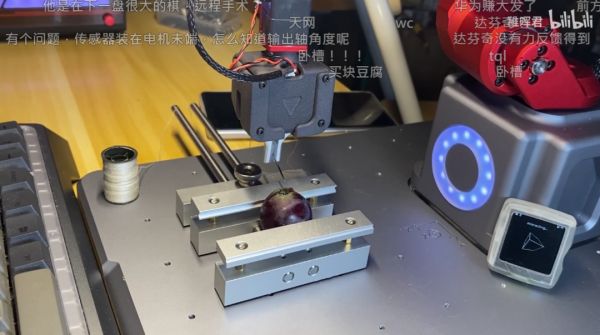
天才少年,用机械臂给葡萄做“外科手术”
中国机械臂厂商主要扎堆于中低端领域,缺乏核心技术,但如今,时代给了我们一次弯道超车的机会。
“这个机器人的每一个环节,拆掉都够我们一个院当毕业设计了。”
“现在终于理解为什么十个普通工程师也比不上一个天才工程师了。”
四个月前,B站UP主稚晖君凭借一辆可以自动驾驶的自行车登上热搜,经过一段时间的“闭关修炼”,当他再次上传视频时,又给我们带来了不小惊喜:这一次,稚辉君造出了一台如同《钢铁侠》里一样强悍的机械臂Dummy,让不少业内人士看完直呼好强。
机械臂或许大家都见过,在工业领域,无论是汽车装配制造还是机械加工,几乎清一色都由机械臂来运作,在太空中,今年由中国自主研制的天和号空间站上也出现了大型机械臂的身影。但由于价格和功能限制,在大部分人家中,我们几乎看不到它,那么稚晖君自己动手造出的这台机械臂究竟有什么特别?

首先,这台机械臂拥有特殊且实用的交互方式。除了传统的电脑输入指令、图形化相位机、手动示教等方式操控外,稚晖君的这台机械臂还加入了一块显示屏,可以通过无线连接来直观看到机械臂动作并控制它。
不仅如此,他还做了更大胆的设计,只需要自己手持远端控制器,就能同步机器人实现手部的各种动作,操作更加简单丝滑,一下子就让机械臂拥有了强悍的动作能力。
但稚晖君还不满足,经过改造的手持遥控器拥有力反馈马达,不但能正向操控机器人的夹爪,还能在抓取物品后远程感受到抓取时的力度,于是,利用这样一套能够远程感受操控力度的装置,这台机械臂实现了类似达芬奇机器人一般强悍的“手术”能力,比如给葡萄做一个缝合手术。
很难想象,这个功能如此强大的机械臂居然是稚晖君利用业余时间,在四个月时间之内做出来的,但为何要做这样一台机械臂?又有哪些创新之处令人关注?在视频中,通过稚晖君分享的设计和思考全过程,我们或许能从中一窥如今国内机械臂领域的变化以及这类产品更深层的意义所在。
自己做一台机械臂要分几步走?
每个理工男或许都梦想过拥有一台机械臂,稚晖君也是如此,他做这个项目的起点来自于淘到的一个二手机械臂。尽管这台机器体型小巧,但配套资料几乎为0,要想实现自己心中期望的各种功能,稚晖君需要自己动手,他把整个过程分成三步:
第一步,功能设计。包括基础功能和扩展应用两部分,基础功能就比如动力学控制、可更换末端效应器、上机位交互等部分。扩展应用则包含AR数字孪生、力觉同步、空间动作捕捉、自主抓取、语音控制等部分。所有功能都要在基础的机械臂上自行解决,这相当于有了食材,但要自己做出完整的一道菜。
第二步,理论分析。设计好功能之后,不但要从运动学分析实现功能的各种参数和算法,还要用动力学去搞定机械臂在活动中用到的各种复杂情况,做理论分析的目的是在整个设计过程中“有法可依”,理论虽然枯燥,但却贯穿到了每一个重要环节。
第三步,技术路线。经过理论分析后将所有功能拆分成具体的环节,其中包括机械臂本体的结构设计和ID设计,闭环伺服和控制器的软件和硬件设计,以及空间定位装置的设计,层层相扣的环节组合在一起才能实现最终的功能目标。
按照这个三步方案,稚晖君首先要在硬件层面依次解决电机、驱动器、减速器这三大核心部分的设计。
一般情况下,工业机器人中采用的都是无刷伺服电机,这种电机的好处在于动态响应、力矩和精度上都很不错,但考虑到自己的机械臂结构紧凑,稚晖君采用了步进电机作为核心,优点在于精度极高,缺点在于高转速下力矩较小,于是他又搭配了谐波减速器作为增大力矩的配件组合,至于驱动部分,为了保证精度以及体积的最小化,稚晖君设计了一个步进电机的一体闭环驱动。

在准备好了电机、驱动器、减速器三大硬件部分之后,稚晖君开始对机械臂的软件层面展开设计,这部分同样十分重要,稚晖君提到整个项目花费时间最多的正是软件部分。
这台机械臂软件核心在于算法,其中就包括运动学正逆解的算法和动力学模型的实现。
前者能够得到机械臂的每个关节角度和最终末端位置之间的正逆解求解关系,后者则用于实现碰撞检测、柔性控制、力学反馈等很多功能,这又涉及到大量复杂的矩阵和偏微分计算,正因如此,机器人才得以尽可能接近于人的手臂一样做出各种灵活动作。
此外,稚晖君还设计了命令行、图形化的上位机、手机端APP以及无线示教固件等等,这还不够,为了能够让机械臂和自己的手同步做出各种动作,他还将双目相机、AHRS系统、华为昇腾AI算力平台集合在一起,设计了可以“同步现实”的远程操控方式,甚至还在主控制器当中使用了基于LiteOS内核的鸿蒙系统,而这一切都是为了能够让机械臂运动自如,并便于操作,正如视频中他自己总结的那样:
“这个项目表面上看起来是电子和机械,其实背后全是算法和数学。”
虽然视频只有16分钟,但稚晖君为了造出这台机械臂整整花了4个月时间,经历了150个版本的修改,可以说,如今能够做到前面提到的各种各样的“黑科技”操作,是因为稚晖君把一台二手且完全不够智能的机械臂变成了一个全新的、附加各种智能功能的新产品,这样硬核且强大的机械臂,自然也就比普通的机械臂更能充当他的桌面小助手了,而从这样一个产品,我们或许还能看到中国机械臂领域的另一面。
中国机械臂前路依旧漫长
明眼人或许发现了,视频中稚晖君淘到的二手机械臂,来自于海外日本三菱公司,而视频中使用到的谐波减速器,在很长一段时间都几乎由海外公司垄断。
作为一种从上世纪70、80年代斯坦福大学实验室中走出的两种机器人形态之一,机械臂在工业机器人领域已经存在半个多世纪,但中国在相关领域的核心技术上依旧和海外有不少差距。正如中国科学院院士,清华大学人工智能研究院教授张钹在2021年世界机器人大会演讲时提到的:
“国产工业机器人多集中于低端应用领域。相对较复杂的多关节机器人市场,国外公司占据国内市场的90%以上份额。国内的工业机器人绝大部分只是组装, 国产自主品牌核心零部件技术尚有差距。国产机器人中80%-90%使用国外减速器,60-70%使用国外电机、40%-50%使用国外控制器,缺乏核心零部件技术。”
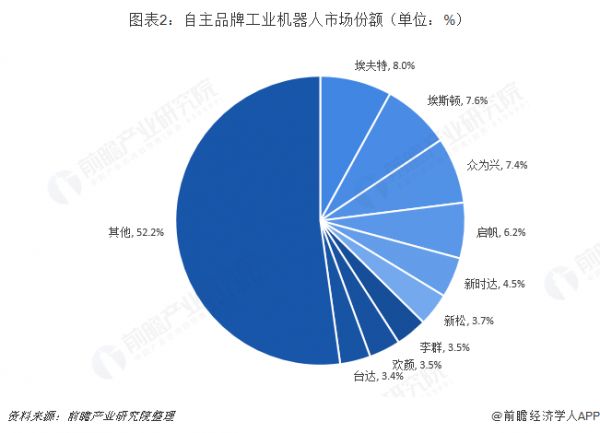
(图自前瞻产业研究院)
一位长期在工业机器人领域工作的从业者也向光锥智能表示:“国内工业机器人起步较晚,现在市场上叫得响的品牌,除了新松,其他绝大部分应该都是在2008年之后成立的,技术积累与四大家族的30-40年积累不可同日而语。”
尤其是在机械臂领域,在他看来,由于相关领域的硬件技术已经较成熟,国内很难发表有较高影响力的创新型学术论文,这导致该领域缺少一流学者引领新技术发展,也影响了国内机械臂产业的发展。
或许,也正因国内公司未能实现机械臂核心技术突破,我们如今依然未能让机械臂还走进寻常百姓家中,这种对比在曾经共同起源于实验室的另一种机器人对比之下更为强烈。
曾经在斯坦福大学实验室诞生的两种机器人,其一是有滚轮的移动机器人,其二则是机械臂,前者在如今伴随着机器视觉、自动驾驶等技术的成熟和普及,成为扫地机器人、酒店服务机器人的核心技术,不但能够快速落地,而且价格也可以继续下探,但后者则由于国内核心技术和零部件迟迟未能实现创新和技术超越,目前仍然无法做到降低成本,也就没有能够进入普通百姓家中的机会。
相比海外公司,中国机械臂厂商主要扎堆于中低端领域,缺乏核心技术,假如你在电商平台搜索,会看到大量价格低廉但功能却十分鸡肋的机械臂产品,正如稚晖君在视频中提到的那样,这些产品既不适合深度开发,实用性也并不高,这或许也是让人感到惋惜的地方。
不过,再来看稚晖君的这次项目,也能发现其闪光的一面,尽管在机械臂领域海外公司在核心技术上尤其硬件部分已经十分成熟,但在人工智能和深度学习算法上,中国公司却有机会能够弯道超车,正如谁也不会想到谷歌曾经愚人节的玩笑——无人自行车会在中国少年的手中变成现实,这一次的机械臂升级也让我们看到了软件重新定义机械的可能性,这或许才是华为“天才少年”做出这些发明的真正意义,就如任正非在今年八月的讲话时谈到的:
“对于2012实验室,公司从未给过你们过多约束。比如,有人研究自行车的自动驾驶,公司没有约束过他。我们要生产自行车吗?没有啊。这是他掌握的一把“手术刀”,或许以后会发挥什么作用,产生什么巨大的商业价值。”
在算法和数学影响的未来世界中,我们很有机会实现反超。
本文来自微信公众号“光锥智能”(ID:guangzhui-tech),作者:罗宁,36氪经授权发布。
相关推荐
天才少年,用机械臂给葡萄做“外科手术”
孙正义下重金的机械臂独角兽梦碎:估值最高40亿美元,做披萨太难吃,只好去做披萨盒
又一家明星机器人公司倒闭:曾是全球机器人技术50强,主打性价比AI机械臂
又一家明星机器人公司倒掉:曾是全球机器人技术50强,主打性价比AI机械臂
“上帝之手”被垄断的三十年
美国农业部资助20万,6名研究生开发机械臂自动捕捞小龙虾,速度媲美熟练虾农
科幻成现实:第一款意念控制机械臂,普通人就可以使用
瞄准K12 AI教育市场,「越疆科技」发布“AI+”桌面级智能机械臂 | 新科技创业2019
2000万一台的“达芬奇”专利到期,国产手术机器人机会来了吗?
36氪独家 | 「迁移科技」获数百万美元Pre-A轮融资,3D视觉机械臂引导系统助力智能工厂柔性生产规模化
网址: 天才少年,用机械臂给葡萄做“外科手术” http://m.xishuta.com/newsview51592.html