MIT机械手可感知地下被埋物体,超纤细手指在地下转向灵活触感敏锐
编者按:本文来自微信公众号“机器人大讲堂”(ID:RoboSpeak),作者:Robospeak,36氪经授权发布。
不知道大家是否有过“在超市里把手伸进散装大米”的经历?
曾有一位网友“动情”地描述过“把手伸进大米里”的奇妙感受:流沙般的陷落感,仿佛整支胳膊都可以被吞没,无法自拔。
这种精敏的触感是人类特有的,如果在大米里找东西,我们可以很容易的根据触感找到。
那机械手怎么从大米里找到埋藏的物体呢?

麻省理工学院(MIT)的研究人员设计了一种配备触觉感应的尖头机械手,叫做Digger Finger,能够挖掘沙子和大米等颗粒状介质,并正确地感知到埋藏物品的形状,这种技术未来可以执行各种地下任务,例如寻找埋地电缆或拆除埋地炸弹。

手指要纤细触感要敏锐
目前,很多机械手都可以识别物体,有的还能够根据物体形状调整抓取力,但这些的前提是,他们在正常的外部环境中。

如果机械手伸进沙子、泥土、大米等颗粒状材料里,辨别并抓取被埋物体,这就变得很难了。
要做到这一点,第一个挑战是形式问题,机器人需要足够纤细的手指,以穿透沙子,不仅如此,还要灵活的自由扭动,并且要足够灵敏以感觉到埋藏物体的具体形状。
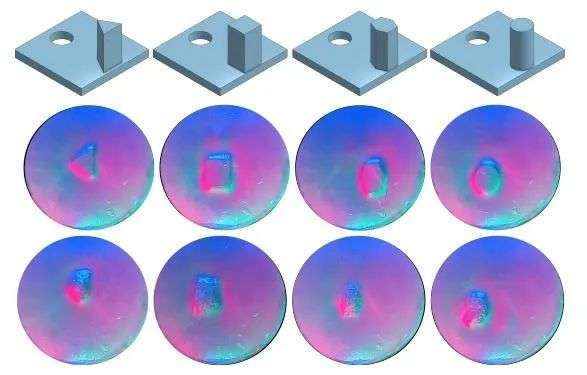
MIT的研究人员找到了一种名为GelSight的触觉传感器,可以充当“Digger Finger”的“手指”。该传感器由一层透明的凝胶组成,上面覆盖着一层反射膜,当物体压在上面时,反射膜会变形。
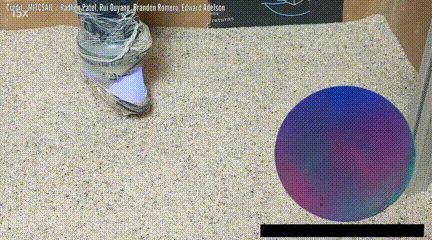
反射膜后面是三种颜色的LED灯和一个摄像头。光线通过凝胶照射到薄膜上,而相机则收集薄膜的反射模式。计算机视觉算法可以提取出触摸物体时的接触区域的三维形状。
这个传感器看起来很完美,也确实具有极好的人工触觉,但体积太大,要让机械手伸进大米中,就必须要缩小体积。
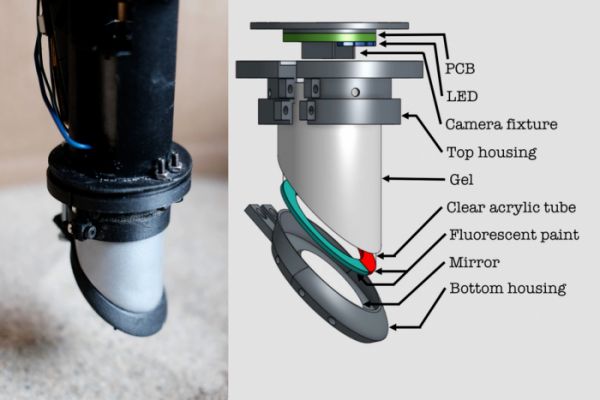
对于“Digger Finger”,研究人员主要通过两种方式缩小了他们的GelSight传感器。首先,他们把形状改成了一个有斜角的细长圆柱体。接下来,他们放弃了三分之二的LED灯,使用了蓝色LED和彩色荧光涂料的组合,这节省了很多复杂性和空间,最终“Digger Finger”的触感膜约为2平方厘米,和人类指尖差不多。
机械振动实现灵活转向,有效对抗颗粒堵塞
光有纤细的“手指”还不够,它必须能够在大米中转向灵活,但大量的颗粒介质产生的阻力很大。为此,MIT团队为“DiggerFinger”增加了振动功能,并在沙子和大米中对其进行了一系列测试。

快速的机械振动有助于“流化”介质,可以帮助“Digger Finger”挖的更深,并克服颗粒介质的阻力,由于沙子更细小,这种流化效果在沙子中比在大米中更难实现。

MIT团队还在大米和沙子中测试了各种扭曲转向运动,有时,每种介质颗粒会卡在“Digger Finger”的触觉膜与埋藏物体之间。在大米中,被困的颗粒大到足以完全掩盖物体的形状,可以通过一点机械手的摆动来清除遮挡物;被困的沙子更难清除,不过小颗粒的沙子意味着“Digger Finger”仍然可以感知目标物体的总体轮廓。

应用场景覆盖各种复杂环境
寻找埋藏在粒状物质中的物体,这并不是一个全新的探索领域,之前使用的技术大多是探地雷达或超声波振动等,但这些技术只能提供埋藏物体的模糊视图,比如,可能分不清地下的是岩石还是骨头。
这项研究的第一作者Radhen博士表示“我们的想法是让手指具有良好的触觉,能够区分它所感受到的各种不同的东西。未来人类可以在各种复杂的环境下使用Digger Finger,比如找到并拆除埋在地下的炸弹,在手术过程中摸索肿瘤,甚至简单到在口袋里摸索钥匙!”
【参考链接】
https://arxiv.org/pdf/2102.10230.pdf
https://techxplore.com/news/2021-05-slender-robotic-finger-items.html
相关推荐
MIT机械手可感知地下被埋物体,超纤细手指在地下转向灵活触感敏锐
MIT十美元AI“灭霸手套”来了
和地球一起流浪的地下城市,到底什么样?
在寒冬里跨年的地下夜店
京东雄安地下物流系统研究新进展:已开始架构规划
潮科技 | 告别“鬼探头”,MIT 开发出能够“绕视”拐角后方的感知系统
MIT“截胡”了一个留给2957年的时间胶囊
捕捉“幽灵粒子”:中国的地下实验,能否洞悉宇宙历史
「无聊公司」造了个「无聊产品」?马斯克秀了套地下小火车
MIT华人科学家打造线形机器人:灵活穿行脑血管,还能轻松急转弯
网址: MIT机械手可感知地下被埋物体,超纤细手指在地下转向灵活触感敏锐 http://m.xishuta.com/newsview44667.html